
v1.0
Table of Contents
- 1 Overview
- 2 Setup
- 3 Introduction
- 4 Specifying rFSM models
- 5 Executing rFSM models
- 6 Common pitfalls
- 7 Tools and helper modules
- 7.1 The event memory extension (
rfsm_ememmodule) #EventMemory - 7.2 Await: trigger transition only after receiving multiple events
- 7.3 Timeevents (
rfsm_timeeventmodule) - 7.4 Configurable and colorized
dbginfo (rfsmppmodule) - 7.5
rfsm_checkeventsplugin - 7.6 Generate graphical representations (
rfsm2umlandfsm2dbgmodules) - 7.7
rfsm-viz: command line front end to rfsm2uml/rfsm2tree - 7.8
rfsm-simsimple rfsm simulator - 7.9 Lua fsm to json conversion (
rfsm2jsoncommand line tool) - 7.10
rfsm_rttUseful functions for using rFSM with OROCOS rtt
- 7.1 The event memory extension (
- 8 More examples, tips and tricks
- 9 API Summary
- 10 Contact
- 11 Download
- 12 Acknowledgement
1 Overview
rFSM is a small and powerful Statechart implementation. It is mainly designed for Coordination of complex systems but is not limited to that. rFSM is written in pure Lua and is therefore highly portable and embeddable. As a Lua domain specific language rFSM inherits the extensibility of its host language.
rFSM is dual licensed under LGPL/BSD.
This README is also available in HTML and Text format in the doc/ subdirectory.
2 Setup
Make sure you have Lua 5.1 installed and the rFSM folder is in your
LUA_PATH. For example:
export LUA_PATH=";;;/home/mk/src/git/rfsm/?.lua"
If your LUA_PATH is already set to something, then just add the
rFSM path instead of overwriting it:
export LUA_PATH="$LUA_PATH;/home/mk/src/git/rfsm/?.lua"
3 Introduction
rFSM is minimal Statechart flavor designed for Coordinating of complex systems such as robots. It has the following features:
- Hierarchical (composite) states
- Completion events
- Parametrizable and reusable states
- Easy to build statemachines by composing existing states/state machines
- Plugin mechanism permits extending the core engine. Available plugins include timeevents, event memory, sequential AND states and more.
- Real-time safe operation possible using lua-tlsf/rtp1
The following shows a simple hello_world example
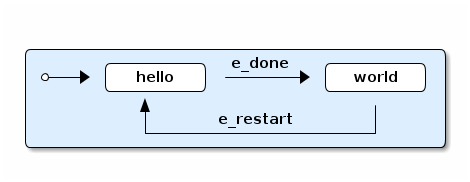
1: return rfsm.state { 2: hello = rfsm.state { exit=function() print("hello") end }, 3: world = rfsm.state { entry=function() print("world") end }, 4: 5: rfsm.transition { src='initial', tgt='hello' }, 6: rfsm.transition { src='hello', tgt='world', events={ 'e_done' } }, 7: rfsm.transition { src='world', tgt='hello', events={ 'e_restart' } }, 8: }
The first line defines a new toplevel composite state and returns
it. The root state of an rFSM state machine is always a state
itself. This permits it to be composed as a substate in a different
state machine. The return statement facilitates reading rfsm model
files by tools or other state machines.
The second and third line define two leaf states that are part of
the toplevel composite state. hello defines an exit function and
world an entry function which are called when the state is
exited/entered, respectively.
The next three lines define transition between these states. The
first is from the initial connector to the hello state. This
transition will be taken the first time the composite state is
entered. The initial connector, as an exception, need not be defined
and will be created automatically when referenced from a transition.
The next transition is from hello to world and is triggered by
the e_done event. This event is raised internally when a state
completes, which is either the case when the states 'doo' function
(see below) finishes or immediately, if there is no doo, as is the
case here. The third transition is triggered by the e_restart
event.
Next we execute this statemachine in the rfsm-simulator:
PMA-10-048 ~/prog/lua/rfsm(master) $ tools/rfsm-sim examples/hello_world.lua Lua 5.1.4 Copyright (C) 1994-2008 Lua.org, PUC-Rio rFSM simulator v0.1, type 'help()' to list available commands INFO: created undeclared connector root.initial > step() hello active: root.hello(done) queue: e_done@root.hello
We execute step() to advance the state machine once. As this is
the first step, the fsm is entered via the 'initial' connector to
the hello state. After that the state hello is active and done
(because no doo function is defined). Consequently, an e_done
completion event has been generated and placed in the queue. So the
next step…
> step()
world
active: root.world(done)
queue: e_done@root.world
… causes a transition to world. As the world state completion
event does not trigger any transitions, running step() again does
not have any effect:
> step()
active: root.world(done)
queue:
But we can manually send in the e_restart event and call step(),
which takes us back to hello:
> se("e_restart") > step() hello active: root.hello(done) queue: e_done@root.hello
4 Specifying rFSM models
rFSM state machines are constructed using three model elements: states, connectors and transitions.
(all functions are part of the rfsm module, thus need to be called
in Lua with the rfsm prefix, e.g. rfsm.state{})
4.1 States (rfsm.state)
States are used to model discrete states of the system and can be
either composite or leaf states. A composite state contains other
states, while a leaf state does not. States can define entry and
exit functions
entry(fsm, state, 'entry') exit(fsm, state, 'exit')
that are called when the state is entered or exited respectively. The arguments passed in are the toplevel statechart, the current state and the string 'entry' resp. 'exit'. Normally you don't need these arguments and should not change them either. (The rationale behind the second and third argument is to permit one function to handle entry and exit of multiple states and hence needs to identify these).
4.1.1 The doo function
Leaf states may additionally define a do function (it is called
doo in rFSM to avoid clashes with the identically named Lua
keyword).
bool doo(fsm, state, 'doo')
The doo function is used to perform actions while a leaf state is active. To that end it can be used such that it is repeatedly called until either the function completes or an event triggers a transition to a different state.
Implementationwise, this function is treated as a Lua coroutine. This enables the following two use-cases:
doois a regular function:doois executed once and a completion evente_doneis raised afterwards (if nodoofunction is defined this event is raised immediately after execution of theentryfunction).- Long running
doowith voluntary preemption: while possible, it is not recommended to define adoofunction that runs for a longer time, because this would prevent incoming events to trigger transitions. Therefore, therfsm.yield()call can be inserted at appropriate points into a long runningdooto explicitly return control to the rfsm engine, that then checks for new events and potentially executes transitions.
(Note: rfsm.yield is currently only an alias to coroutine.yield)
The following example illustrates the second use case:
doo = function(fsm) while true do if min_distance() < 0.1 then rfsm.send_events(fsm, "e_close_obj") end rfsm.yield() end end
This doo will check a certain condition repeatedly and raise the
"e_close_obj" event if it is true. Each cycle the control is
returned to the rFSM core by calling rfsm.yield().
rfsm.yield(idle_flag) accepts a Boolean argument (called the
"idle flag") that influences how doo is called by the rFSM core:
if true it will cause the rFSM core to go idle, provided there
are no other events. If false (the default2 if no arguments
are given) and there are no other events, doo will be called in
a tight loop. It depends on each application which idle_flag is
appropriate. In general the idle_flag should always be true unless
the intention is that the doo function is executed as fast as
possible (potentially consuming a lot of CPU!).
4.1.2 Configuring a State Machine
The root composite state honors some extra fields to refine the global FSM behavior.
Configuring error, warning, informational and debug output. The
err, warn, info and dbg fields can be used to fine tune
how these messages are output. The value of these fields can be
either true or false or set to a function that accepts a variable
list of arguments. The default is to write errors and warnings to
stderr and info to stdout. Debug messages are turned off by
default. Nicer and configurable pretty printing of debug output is
provided by the rfsmpp module (described below).
The getevents hook. The getevents hook is called by the
rFSM core whenever it needs to check for new events. This function
is the central mechanism to integrate rFSM into existing
systems. The expected behavior is to return a Lua table of events
(array part only). These events are then used to check for enabled
transitions.
4.2 Transitions (rfsm.transition)
Transitions define how a state machine changes state upon receiving events:
Example:
rfsm.transition {
src='stateX', tgt='stateY', events = {"e1", "e2"},
guard=function()
if getVal() > 0.3 then
return false
end
return true
end,
effect=function () do_this() end
}
The above defines a transition between stateX and stateY which is
triggered by the events e1 and e2. The guard condition
(optional) will prevent the transition from being executed if it
returns false. The effect function (optional) will be executed
during the transitioning of the function. If no events are
specified, this is interpreted as any events will trigger the
transition.
Three ways of specifying the src and target states are
supported: local, relative or absolute. In the above example
stateX and stateY are referenced locally and must therefore be
defined within the same composite state as the transition.
Relative references specify states that are more deeply nested (relative to the position of the transition). Such references starts with a leading dot. For example:
return rfsm.state{ operational=rfsm.state{ motors_on = rfsm.state{ moving = rfsm.state{}, stopped = rfsm.state{}, rfsm.trans{src='initial', tgt='stopped'}, }, rfsm.trans{src='initial', tgt='motors_on'}, }, off=rfsm.state{}, rfsm.trans{src='initial', tgt=".operational.motors_on.moving" } rfsm.trans{src=".operational.motors_on.stopped", tgt='off', events={'e_off'} } }
The first transition is defined between the (locally referenced)
initial connector to the relatively referenced moving
state. This permits to refine the default behavior of the
operational state, namely entering motors_on.stopped (due to the
initial connectors), to instead enter the motors_on.moving state.
The second transition defines a transition from the relatively
referenced operational.motors_on.stopped to off. Here the
intention is to constrain the states from which one can reach the
off state: turning the device off is only permitted if it is not
moving.
At last absolute references begin with "root." Using absolute syntax is strongly discouraged for anything other than testing, as it breaks compositionality: if a state machine is used within a larger statemachine the absolute reference is broken.
Furthermore, transitions support so called priority numbers. Priority numbers serve to resolve conflicts within one
hierarchical level. In case two transitions are enabled by a set of
events, the transition with the higher priority number will be
executed. Priority numbers are defined with the pn keyword on
transitions, as shown below. Transitions without priority numbers
are assumed to have priority 0.
rfsm.trans{ src='following', tgt='hitting', pn=10, events={ 't6' } },
If possible, statecharts should be designed not to depend on priority numbers and introduce these rather as an optimization.
4.3 Connector (rfsm.connector)
Connectors permit to define so called compound transitions by chaining multiple transition segments together. Connectors are similar to the UML junction element. Compound transitions are statically evaluated, meaning that the compound transition is only executed if each subtransition is enabled (events match and guards are true).
Also see the examples connector_simple.lua and
connector_split.lua.
Connectors are useful for defining interfaces (entry and exit points) that hide internals of a composite state. The following example defines a error handling state:
return rfsm.state{ software_err = rfsm.state{}, hardware_err = rfsm.state{}, initial = rfsm.conn{}, recovered = rfsm.conn{}, failed = rfsm.conn{}, rfsm.trans{src='initial', tgt='software_err', events={'e_sw_err'}}, rfsm.trans{src='initial', tgt='hardware_err', events={'e_hw_err'}}, rfsm.trans{src='software_err', tgt='recovered', events={'e_recovered'}}, rfsm.trans{src='hardware_err', tgt='recovered', events={'e_recovered'}}, rfsm.trans{src='software_err', tgt='failed', events={'e_failed'}}, rfsm.trans{src='hardware_err', tgt='failed', events={'e_failed'}}, }
Transitions 1 and 2 dispatch to different error handling states based on the events received. Transitions 3, 4, 5 and 6 connect the states to different exit connectors based on the events they generate.
Note: defining cycles is possible, but dangerous, unsupported and discouraged. It may make the yogurt in your fridge grow fine grey beards.
5 Executing rFSM models
Before running a statemachine must be initalized. This serves to
validate the fsm model and transform the fsm to be suitable for
execution. Initalization is done using the rfsm.init(fsm)
function, that takes a (string) rfsm description as input and
returns an initalized fsm. To load an rfsm from a file and initialize
it, the rfsm.load(filename) function can be used:
fsm = rfsm.init(rfsm.load("fsm.lua"))
If the return value from rfsm.init is not false, initalization
succeeded and the returned fsm can be run.
The function rfsm.step(fsm, n) will attempt to step the given fsm
for a maximum of n times. A step can be either the execution of
a transition or a single execution of the doo program. step
will return either when the state machine is idle or the given
number of steps has been reached. The boolean return value indicates
whether the fsm is idle (true) or the maximum amount of requested
steps was reached (false).
For each step the rfsm engine will invoke the getevents hook to
retrieve new events and then reason about what to do (which
transitions to execute or doo's to run). After that these events
are discarded. If this seems inconvenient, checkout the event memory
extension.
When omitted, the number of steps argument n to rfsm.step
defaults to 1.
rfsm.run(fsm) calls step as long as the given fsm is not
idle. Not idle means: there are either events in the queue or there
is an active doo function that is not idle.
To directly send events to the fsm the function
rfsm.send_events(fsm, e1, e2, ...) can be used. The first argument
is the fsm to which all subsequent event arguments are sent to.
6 Common pitfalls
- Name clashes between state/connector names with reserved Lua
keywords.
This can be worked around by using the following syntax:
['end'] = rfsm.state{...} - Executing functions accidentially
It is a common mistake to execute externally defined functions instead of adding references to them:
stateX = rfsm.state{ entry = my_func() }The (likely) mistake above is to execute my_func and assigning the result to entry instead of assigning my_func:
stateX = rfsm.state{ entry = my_func }Of course the first example would be perfectly valid if my_func() returned a function as a result!
- Why doesn't my statemachine react if I send a completion event
e_donefrom the outside?Short answer: because it is a syntactic shortcut for the completion event of the source state of the transition which it is defined on. During initalization it is transformed to
e_done@fqn(e.g.e_root@root.stateA.stateB) If you send in the expanded completion event it will work.Explanation: a completion event only makes sense in the context of a state which completed. Making the state which has completed explicit in the event avoids accidentially triggering a transition labeled with a higher priority completion event that has nothing to do with the current one.
The same holds true for
rfsm_timeeventbased timeevents. - My FSM is using up 100% CPU, what's wrong?
Most likely you have defined a long running
doofunction that does not callrfsm.yieldwith atrueargument (the idle flag). Therefore the rFSM engine calls thedoofunction in a tight loop. - My FSM is doing nothing, my guard are not executed, … ,
although I'm running
steporrunperiodically!rFSM will only attempt to transition if it has at least one event in the queue! If you only want to transition based on guards, raise a dummy event (e.g. "e_any").
7 Tools and helper modules
7.1 The event memory extension (rfsm_emem module) #EventMemory
This extension adds memory of events that occurred to an rFSM
statechart. This is done maintaining a table emem for every
state. The keys in this table are event names and the values the
number of times that event occurred while the respective state was
active. The emem table is cleared when a state is exited by
setting all values to 0.
This extension is useful for defining transitions that are taken only after certain events have occurred, but that do not necessarily occur within one step. Because the rFSM engine drops events after each steps this information would otherwise be lost.
To enable event memory, all you need to do is load the rfsm_emem
module. Checkout the examples/emem_test.lua for more details.
7.2 Await: trigger transition only after receiving multiple events
In a nutshell, this plugin permits to trigger transitions only after multiple events have been received. These events can be received in different steps.
This is basically a specialized version of the emem plugin. This one should be preferred if no counting is required, since it is computationally much less expensive.
Behavior: When loaded, the plugin scans for events with the syntax "await(event1, event2)". This statement is transformed as follows:
- a guard condition is generated and added to possibly existing guard conditions. It will only enable the transition if the both events have been received while the source state is active.
- a second hook is installed in the exit function of the source state to reset the event counting. So when the source state is exited (either via or not via the await transition) and reentered again, the counting start from the beginning. It would be trivial to provide a variant of await that resets the counts only if the await transition is taken, however it is not clear right now if that would be useful at all.
For more information checkout the await.lua example.
7.3 Timeevents (rfsm_timeevent module)
This module extends the rFSM engine with time events. Time events
are automatically raised after the specified time after entering
a state has elapsed. To enable time events, it suffices to load the
rfsm_timeevent module. Currently only relative (opposed to
absolute) timeevents are supported. These can be specified on
transitions using the e_done(duration) syntax, as show in the
following example:
rfsm.trans{ src='A', tgt='B', events={ 'e_after(0.1)' } },
The timeevent will be raised 100ms after state A was entered.
The only requirement of a rfsm_timeevents is that a gettime
function is configured using the
rfsm_timeevent.set_gettime_hook(f) function. This function is
expected to return the current time in two return values: seconds,
nanoseconds.
An example can be found in examples/timeevent.lua
Warning: these timeevents only work while the rfsm engine is running and can not magically wake up an idle fsm. Therefore this type of timeevents typically only makes sense for fsm that are "stepped" at a fixed frequency or that never go idle.
7.4 Configurable and colorized dbg info (rfsmpp module)
The rfsmpp.gen_dbgcolor function generates a configurable and
colorful dbg hook.
Usage:
rfsmpp.gen_dbgcolor(name, dbgids, defshow)
nameis the (optional) string name to print prefixing the debug outputdbgidsis a table that enables or disables certain dbg ids by setting them to true or false. Known debug ids are:STATE_ENTER,STATE_EXIT,EFFECT,DOO,EXEC_PATH,ERROR,HIBERNATING,RAISED,TIMEEVENTdefshow(bool) defines whether debug id's not mentioned in the dbgids table are shown or not.
Example:
fsm = rfsm.init(...) fsm.dbg=rfsmpp.gen_dbgcolor("fsm1", { STATE_ENTER=true, STATE_EXIT=true}, false)
Will show only STATE_ENTER and STATE_EXIT debug messages.
7.5 rfsm_checkevents plugin
This debugging helper plugin will at load-time construct a list of all events used in the FSM. If at runtime an event is received which is not known in the known list, a warning message will be printed.
To use, just require the module before creating your fsm. Important: load it after other plugins that transform events (such as timeevents), so that it picks up the transformed events.
7.6 Generate graphical representations (rfsm2uml and fsm2dbg modules)
Modules to transform rFSM models to graphical
descriptions. rfsm2uml generates classical statechart figures and
rfsm2tree generates a tree representation (useful to see check
priorities).
Usage:
rfsm2uml.rfsm2uml(root_fsm, format, outfile, caption)rfsm2tree.rfsm2tree(root_fsm, format, outfile)
Examples:
require("rfsm2uml") fsm = rfsm.init(rfsm.load("fsm.lua")) rfsm2uml.rfsm2uml(fsm, 'png', "fsm.png", "Figure caption")
or
require("rfsm2tree") fsm = rfsm.init(rfsm.load("fsm.lua")) rfsm2tree.rfsm2tree(fsm, 'png', "fsm-tree.png")
The rfsm-viz command line uses these modules to generate
pictures.
7.7 rfsm-viz: command line front end to rfsm2uml/rfsm2tree
to generate all possible formats run:
$ tools/rfsm-viz all examples/composite_nested.lua
generates various representations (in examples/)
7.8 rfsm-sim simple rfsm simulator
small command line simulator for running a fsm interactively.
$ tools/rfsm-sim all examples/ball_tracker_scope.lua
It requires an image viewer which automatically updates once the
file displayed changes. For example evince works nicely.
7.9 Lua fsm to json conversion (rfsm2json command line tool)
Based on rfsm2json.lua module and requires lua-json.
7.10 rfsm_rtt Useful functions for using rFSM with OROCOS rtt
See the Orocos LuaCookbook for more details.
8 More examples, tips and tricks
8.1 A more complete example
The graphical model:
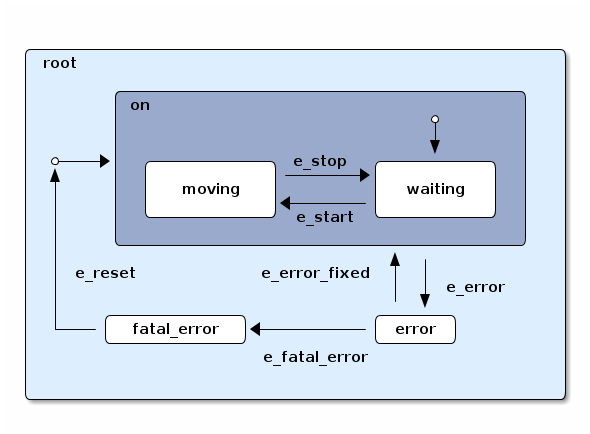
… and the corresponding textual representation:
-- any rFSM is always contained in a state return rfsm.state { dbg = true, -- enable debugging on = rfsm.state { entry = function () print("disabling brakes") end, exit = function () print("enabling brakes") end, moving = rfsm.state { entry=function () print("starting to move") end, exit=function () print("stopping") end, }, waiting = rfsm.state {}, -- define some transitions rfsm.trans{ src='initial', tgt='waiting' }, rfsm.trans{ src='waiting', tgt='moving', events={ 'e_start' } }, rfsm.trans{ src='moving', tgt='waiting', events={ 'e_stop' } }, }, error = rfsm.state { doo = function (fsm) print ("Error detected - trying to fix") rfsm.yield() math.randomseed( os.time() ) rfsm.yield() if math.random(0,100) < 40 then print("unable to fix, raising e_fatal_error") rfsm.send_events(fsm, "e_fatal_error") else print("repair succeeded!") rfsm.send_events(fsm, "e_error_fixed") end end, }, fatal_error = rfsm.state {}, rfsm.trans{ src='initial', tgt='on', effect=function() print("initializing system") end }, rfsm.trans{ src='on', tgt='error', events={ 'e_error' } }, rfsm.trans{ src='error', tgt='on', events={ 'e_error_fixed' } }, rfsm.trans{ src='error', tgt='fatal_error', events={ 'e_fatal_error' } }, rfsm.trans{ src='fatal_error', tgt='initial', events={ 'e_reset' } }, }
8.2 How to compose state machines
This is easy! Let's assume the state machine is is a file
"subfsm.lua" and uses the strongly recommended return rfsm.state ... syntax, it can be included as follows:
return rfsm.state { name_of_state = rfsm.load("subfsm.lua"), otherstateX = rfsm.state{}, ... }
Make sure not to forget the ',' after the rfsm.load() statement!
8.3 Using rfsm with Orocos RTT
The LuaCookbook page describes how to do this.
9 API Summary
9.1 State specification
Functions to define rFSM:
| Function | Short alias | Description |
|---|---|---|
state{} | state{} | create a state |
connector{} | conn{} | create a connector |
transition{} | trans{} | create a transition |
9.2 Operational functions
| Function | Description |
|---|---|
fsm rfsm.init(fsmmodel) | create an initialized rfsm instance from model |
idle rfsm.step(fsm, n) | attempt to transition FSM n times. Default: once |
rfsm.run(fsm) | run FSM until it goes idle |
rfsm.send_events(fsm, ...) | send one or more events to internal rfsm event queue |
9.3 Hooks
The following hook functions can be defined for a toplevel composite state and allow to refine various behavior of the state machine.
| Function | Description |
|---|---|
dbg | called to output debug information. Set to false to disable. Default: false. |
info | called to output informational messages. Set to false to disable. Default: stdout. |
warn | called to output warnings. Set to false to disable. Default stderr. |
err | called to output errors. Set to false to disable. Default stderr. |
table getevents() | function which returns a table of new events which have occurred. |
Lower level functions (not for normal use):
Use these to manage step hooks. Setting pre_step_hook and
post_step_hook directly is not permitted anymore:
| Function | Description |
|---|---|
pre_step_hook_add(fsm, hook, where) | install function hook to be called before each rfsm step of fsm |
post_step_hook_add(fsm, hook, where) | install function hook to be called after each rfsm step of fsm |
idle_hook(fsm): if defined, called instead of returning from
step/run functions. Used only for debugging purposes.
10 Contact
Please direct questions, bugs or improvements to the orocos-users mailing list.
11 Download
12 Acknowledgement
- Funding
The research leading to these results has received funding from the European Community's Seventh Framework Programme (FP7/2007-2013) under grant agreement no. FP7-ICT-231940-BRICS (Best Practice in Robotics)
- Scientific background
This work borrows many ideas from the Statecharts by David Harel and some from UML 2.1 State Machines. The following publications are the most relevant
David Harel and Amnon Naamad. 1996. The STATEMATE semantics of statecharts. ACM Trans. Softw. Eng. Methodol. 5, 4 (October 1996), 293-333. DOI=10.1145/235321.235322 http://doi.acm.org/10.1145/235321.235322
The OMG UML Specification: http://www.omg.org/spec/UML/2.3/Superstructure/PDF/
Footnotes:
1 See this Real-time Linux Workshop paper, lua-tlsf and the minimal Lua real-time POSIX bindings
2 The reason for this choice of default is that it fails more obviously (100% CPU load) than the opposite (doo function not executed properly).